Ubuntu与ROS系统安装使用报错汇总
roscore 运行,报 .ros权限错误,如下图所示。
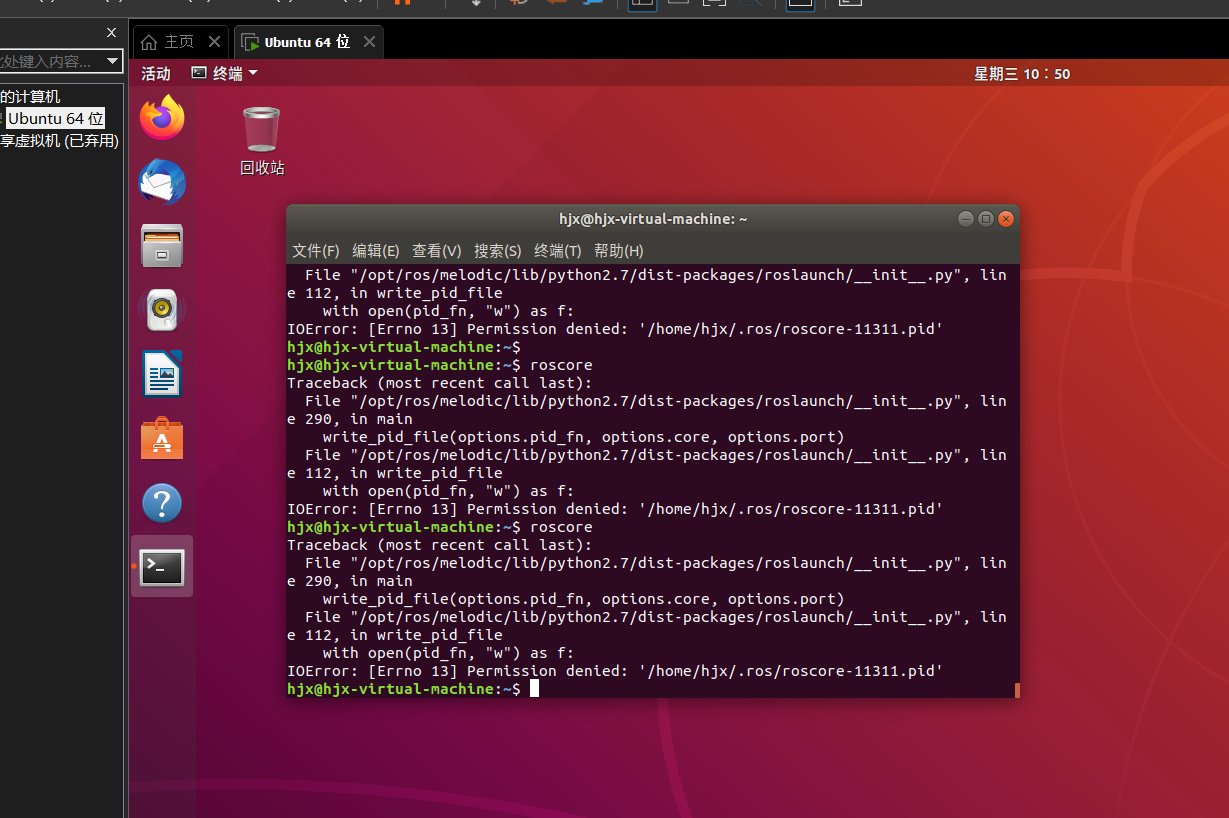
解决办法:sudo rm -rf ~/.ros,然后再运行roscore即可。
2.ROS安装系统依赖错误,如下图所示。
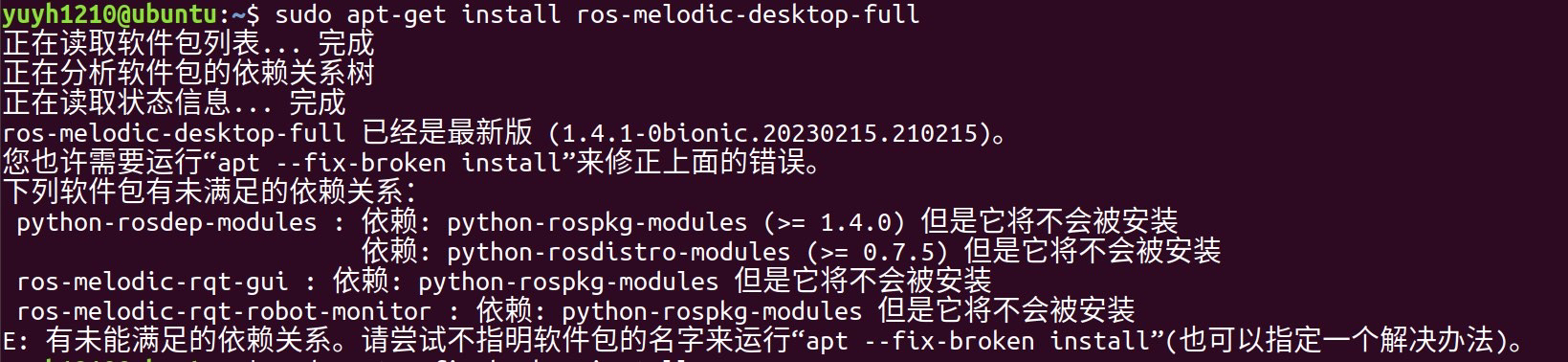
解决办法如下:
cd /var/lib/dpkg/
sudo mv info/ info_bak # 现将info文件夹更名
sudo mkdir info # 再新建一个新的info文件夹
sudo apt-get update # 更新
sudo apt-get -f install # 修复
sudo mv info/* info_bak/ # 执行完上一步操作后会在新的info文件夹下生成一些文件,现将这些文件全部移到info_bak文件夹下
sudo rm -rf info # 把自己新建的info文件夹删掉
sudo mv info_bak info # 把以前的info文件夹重新改回名
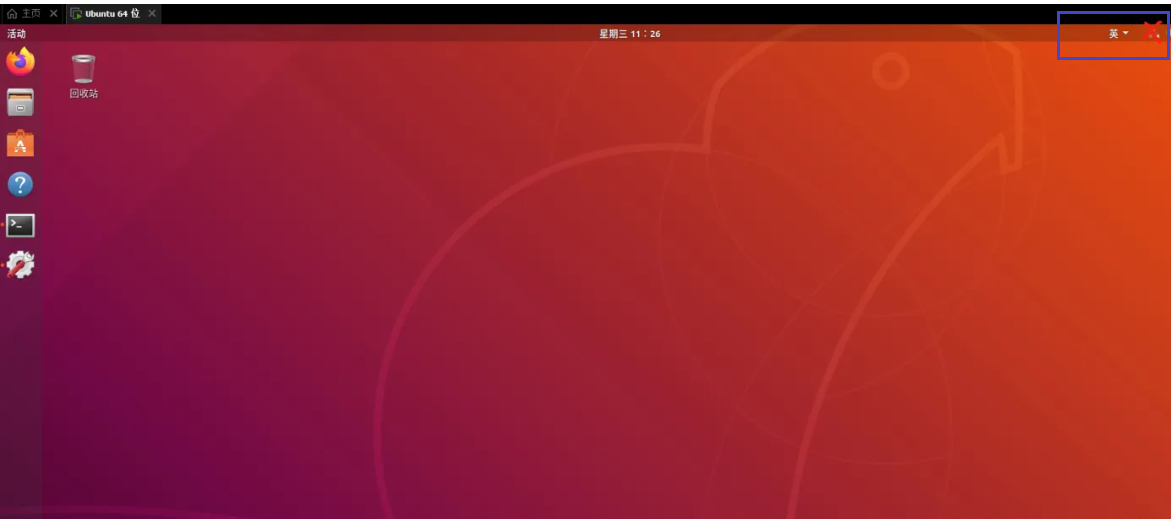
3.虚拟机ubuntu系统不能联网,右上角无网络标识符。
解决方法一:
1、关闭当前虚拟机(一定要关闭,否则无法进行后续操作)
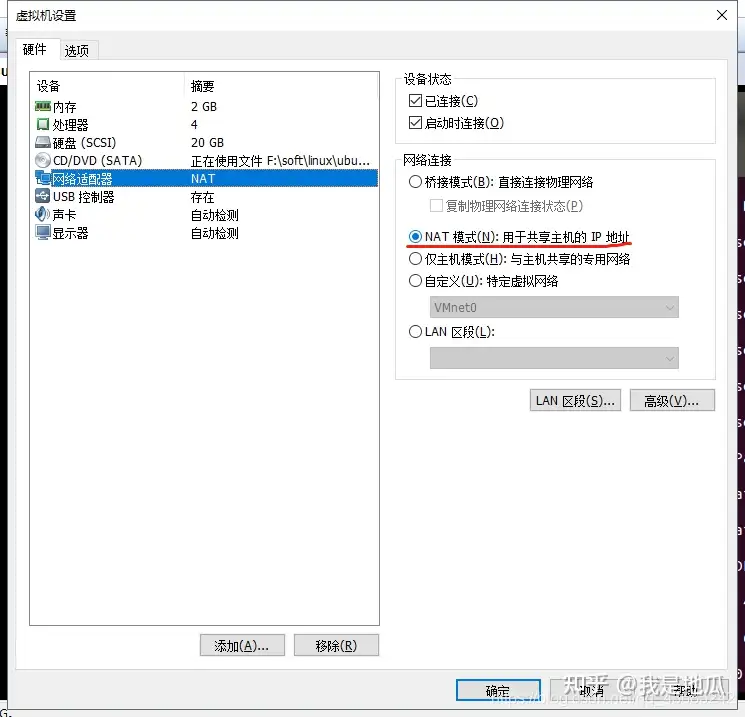
2、选择虚拟机设置查看网络配置是否正确(选择NAT连接);
点击确定
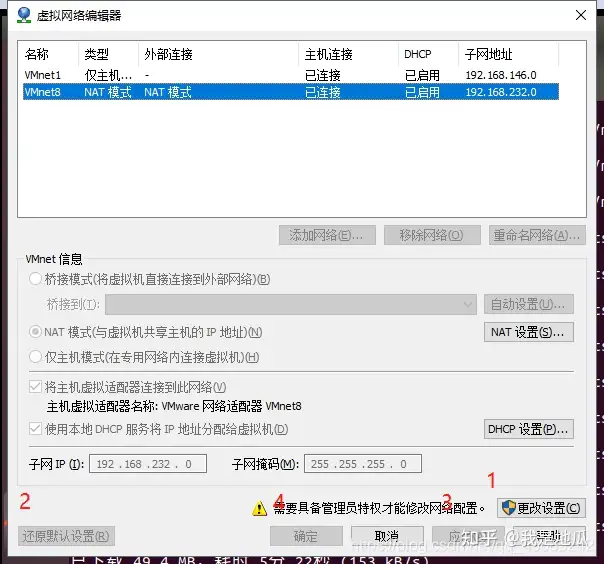
3、选择编辑目录下的虚拟网络编辑器
按图中所示的1,2,3,4步进行操作
4、最后重启Ubuntu系统就可以连接网络了。
解决方法二:
打开命令行,输入以下命令,即可:
sudo service network-manager stop sudo rm /var/lib/NetworkManager/NetworkManager.state sudo service network-manager start sudo gedit /etc/NetworkManager/NetworkManager.conf #在这个文件里,把第四行的false改成true,然后保存退出 sudo service network-manager restart
 解决办法三:
解决办法三:
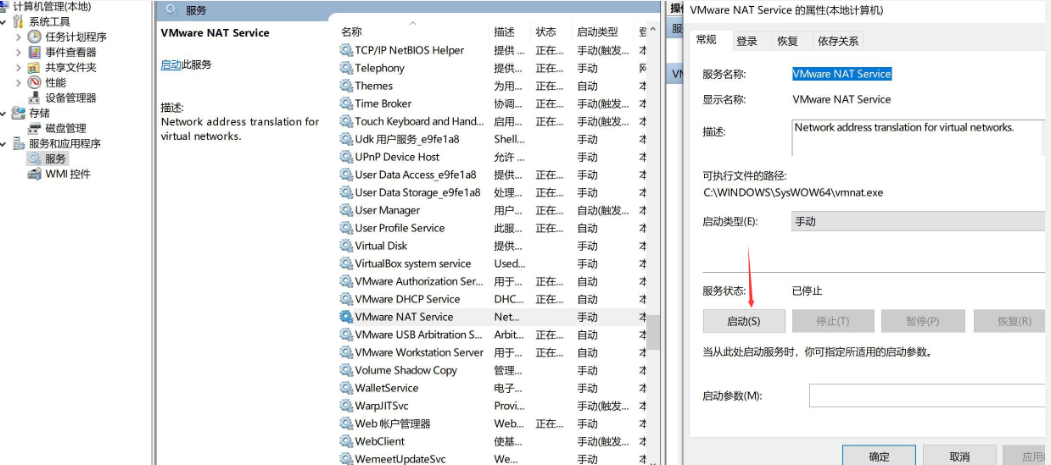
如果大家使用了锐捷客户端来连接校园网,那么锐捷客户端会自动把服务里面的VMware net service关闭,所以连不上网(没有网络图标),因此在用Ubuntu的时候不要用锐捷客户端来连网;接下来就是如何打开VMware net service。
打开服务
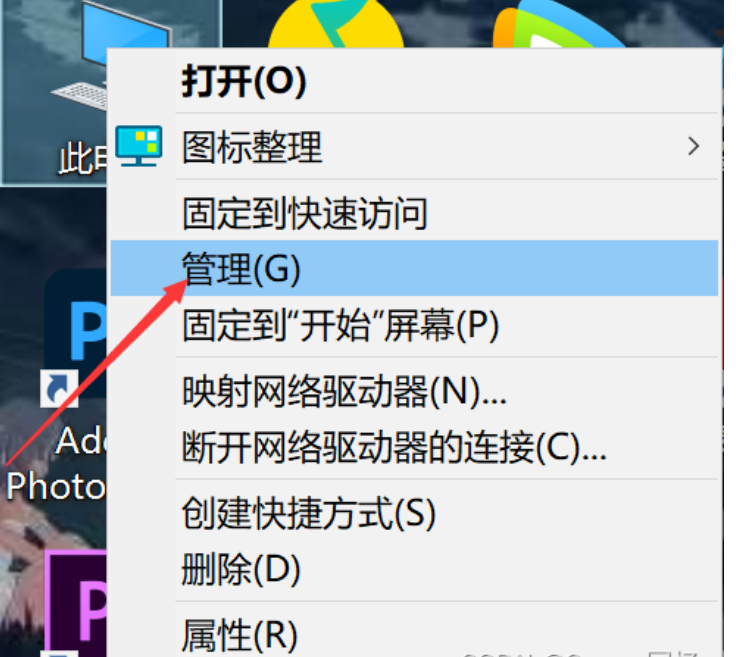
找到此电脑,右键后找到管理这个选项
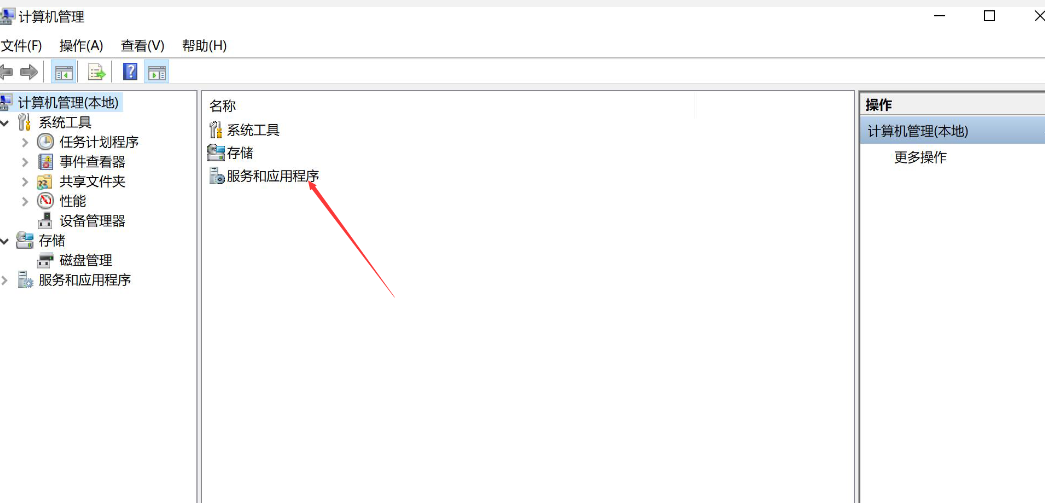
点击进去后,点击进入服务和应用程序
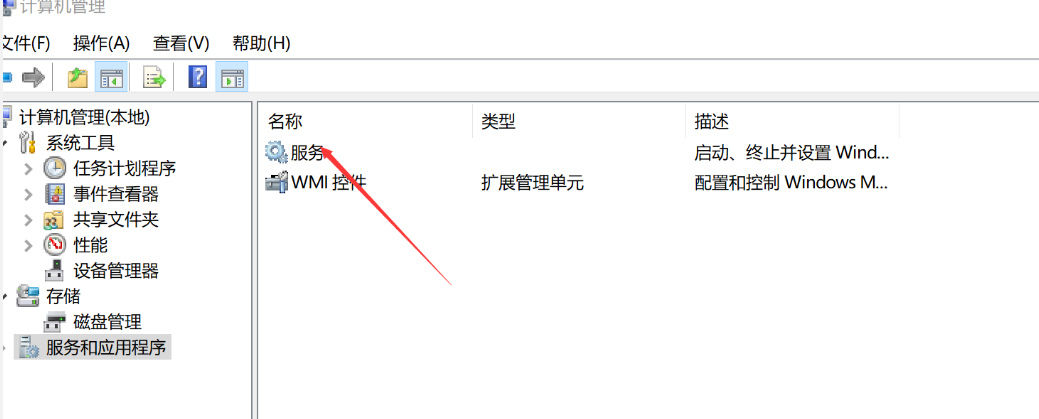
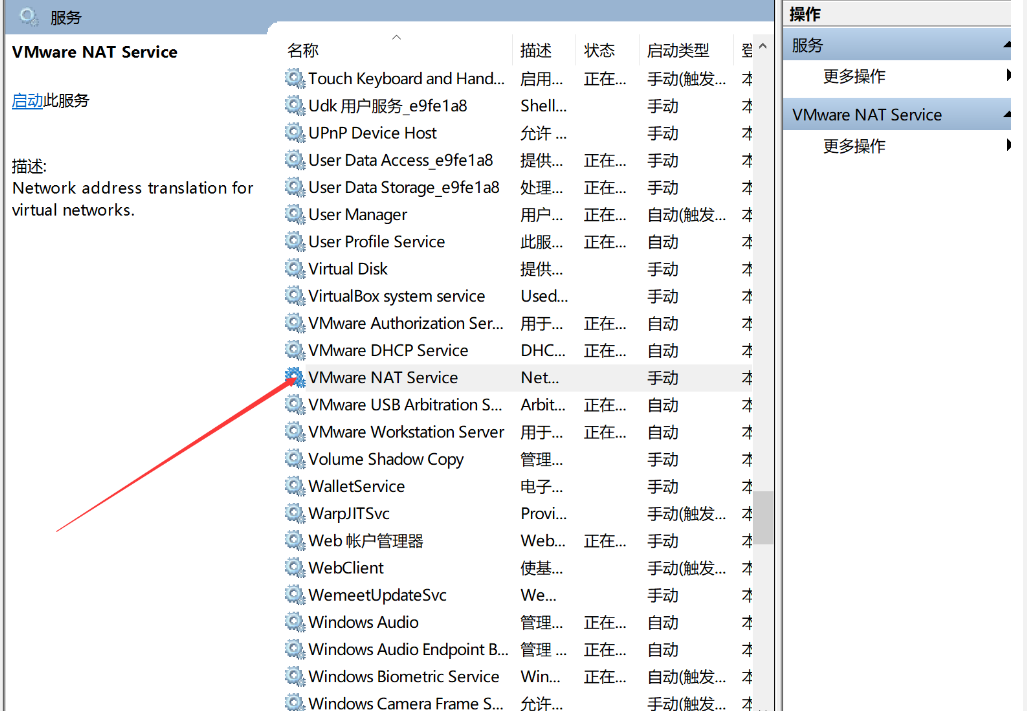
接下来就是进入服务找到VMware net service
点击打开后,点击启动即可,再进入虚拟机的Ubuntu就有网络啦!