-
1
-
2
这一节主要以两个实例说明 IK 拾取对象,单手抓取动画的制作方法。
1.开门动作和单手取物动作 2.骑独轮车(案例2)
开门动作和单手取物动作
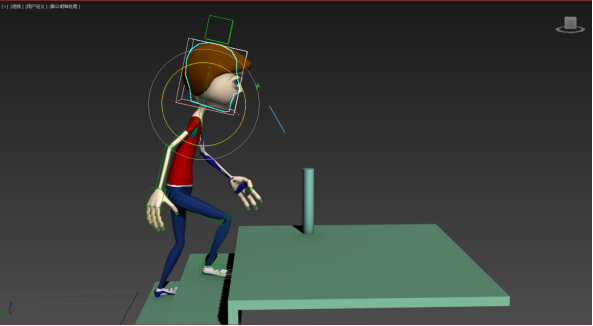
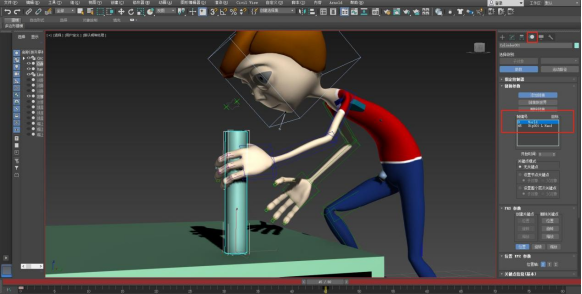
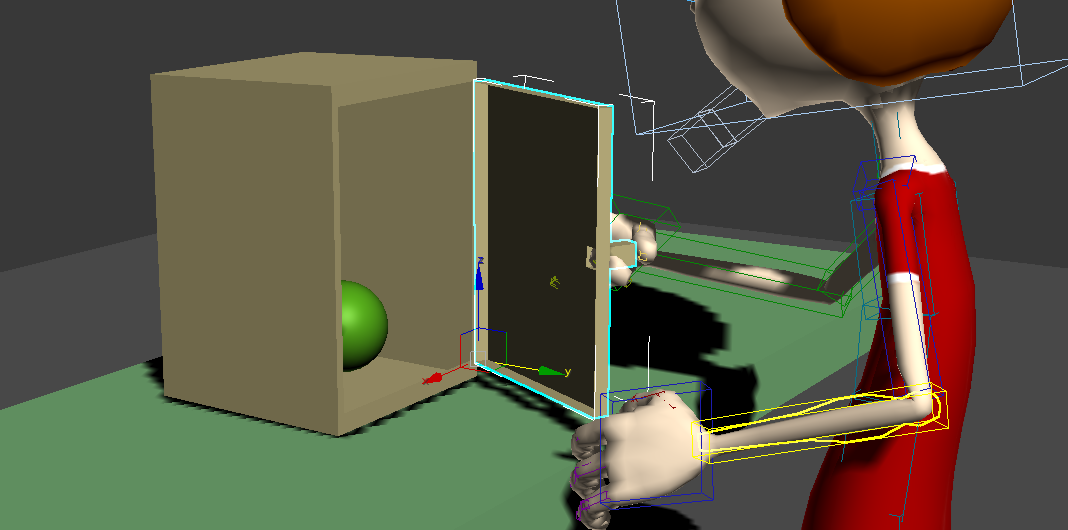
1.先做一个开门的姿势,然后给门一个旋转的动画:
2. 接下来要做的就是,让手臂跟着门一起运动,可以看到门的运动轨迹,虽然是弧线,但是是非常规则的弧线,非常有规律的。可以想象一下,如果用正向动力学,使用胳膊带动手,当然可以做一个弧线,但是没有办法做很规则的弧线,因为这里是要和门的轨迹一样,实质上是受门的约束的,而正向动力学是不受约束的,很难和们的轨迹一模一样。
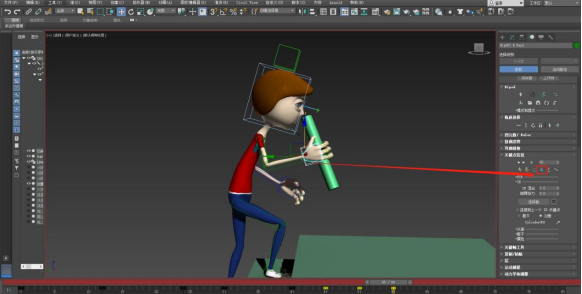
这里使用“对象”的方式,仔细看的话,这个对象下面其实是可以拾取物体的,前面几节课都没有用到,如果不拾取,默认的是以世界空间作为对象的。这里我们拾取一下门把手:
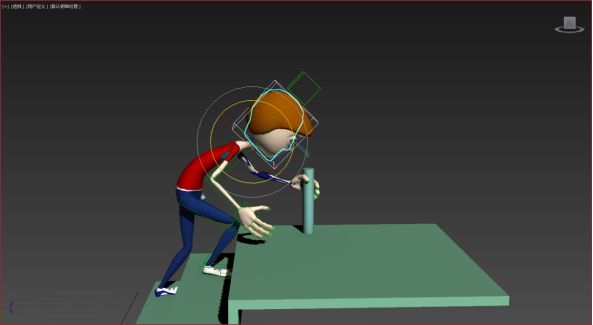
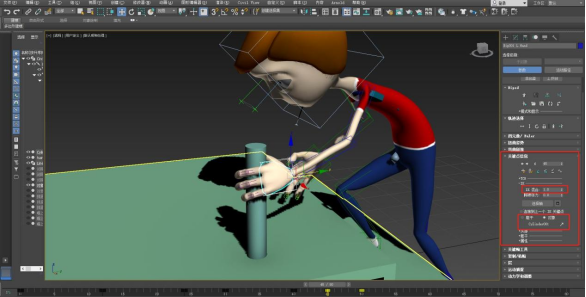
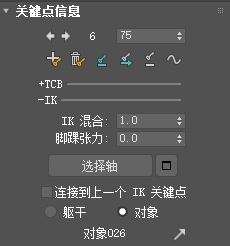
这时候会弹出一个提示,意思是这个操作会把 IK混合数值改为0,点击确定,然后这个门把手就添加进来的,这时候,我们拖动时间轴,发现手并没有跟着把手运动。仔细看一下我们的IK混合,数值被改为0了。重新改回到1,这时候再次拖动时间轴:
3.发现手臂跟着门运动了!这个例子其实是一个反作用力的例子,门带动把手,把手反作用与手腕,手腕有带动胳膊,但是动视觉上来看,好像是人去拉的门,把门拉开,但其实是给门做的动画而不是手臂,这也是很典型的例子,有些时候,做动画不能完全按照现实去走,有时候用反想动力学去做看似是正向动力学的动画反而简单很多,这在后面会经常用到。
备注:当不需要关联时,则将混合设置为"0",连接到“躯干”。
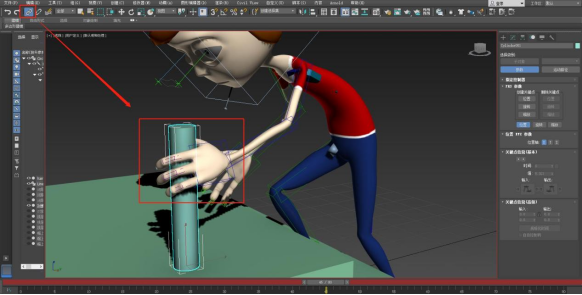
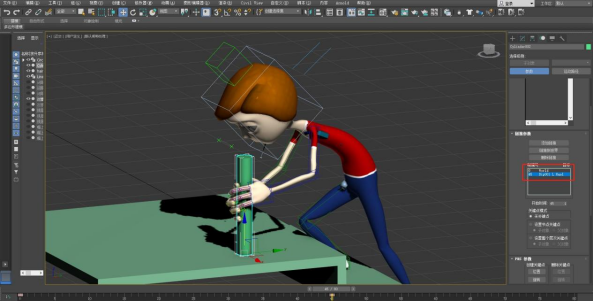
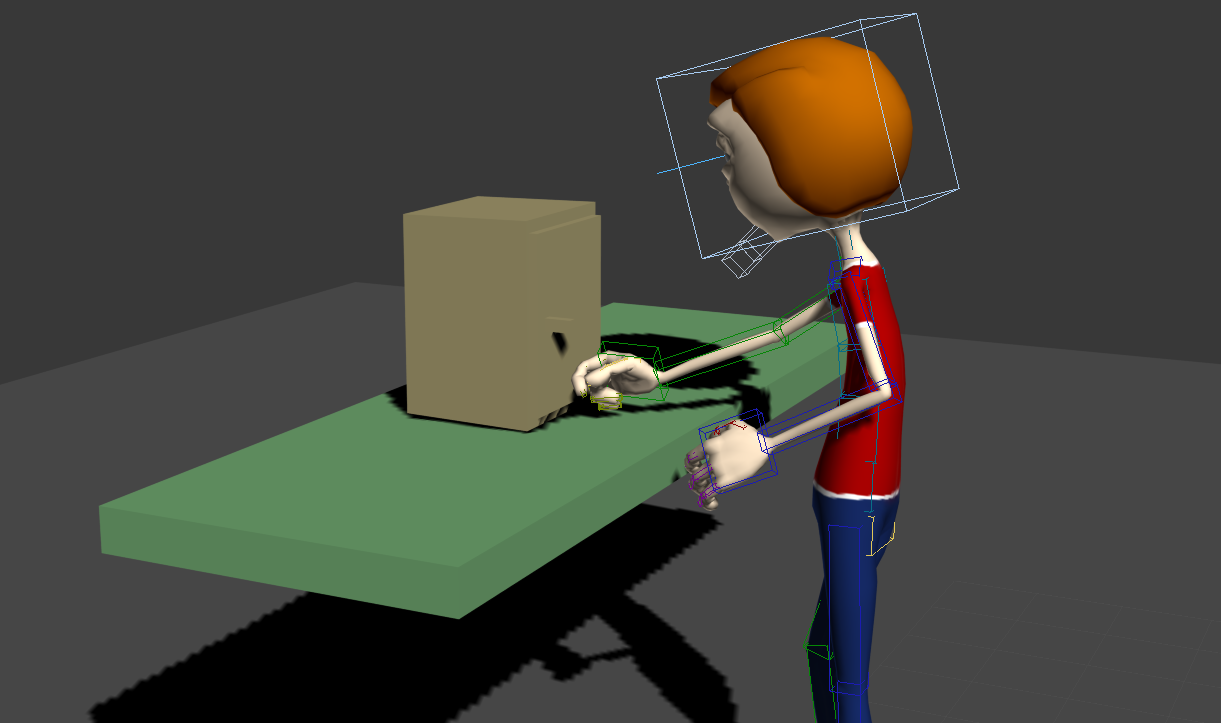
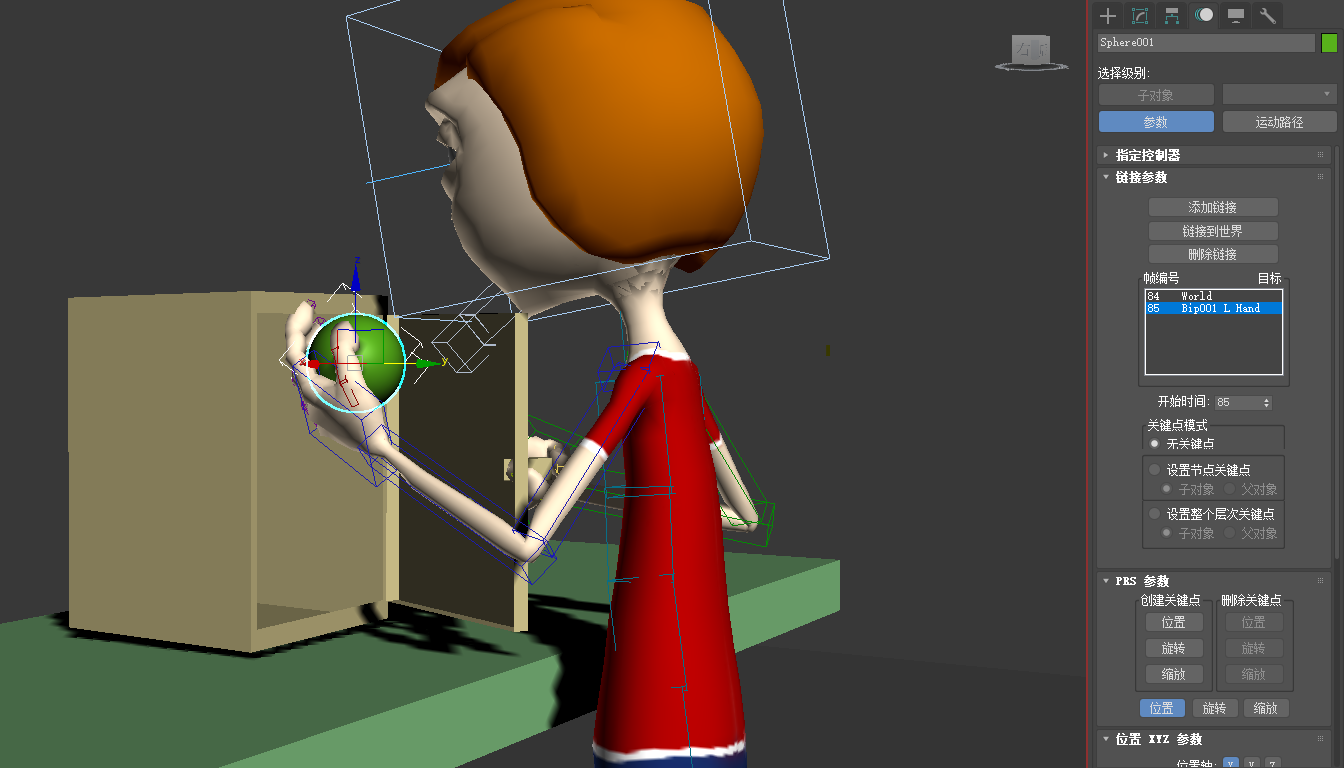
4.现在用另外一只手去取箱子中的物件,首先我们把手的姿势与物体放好。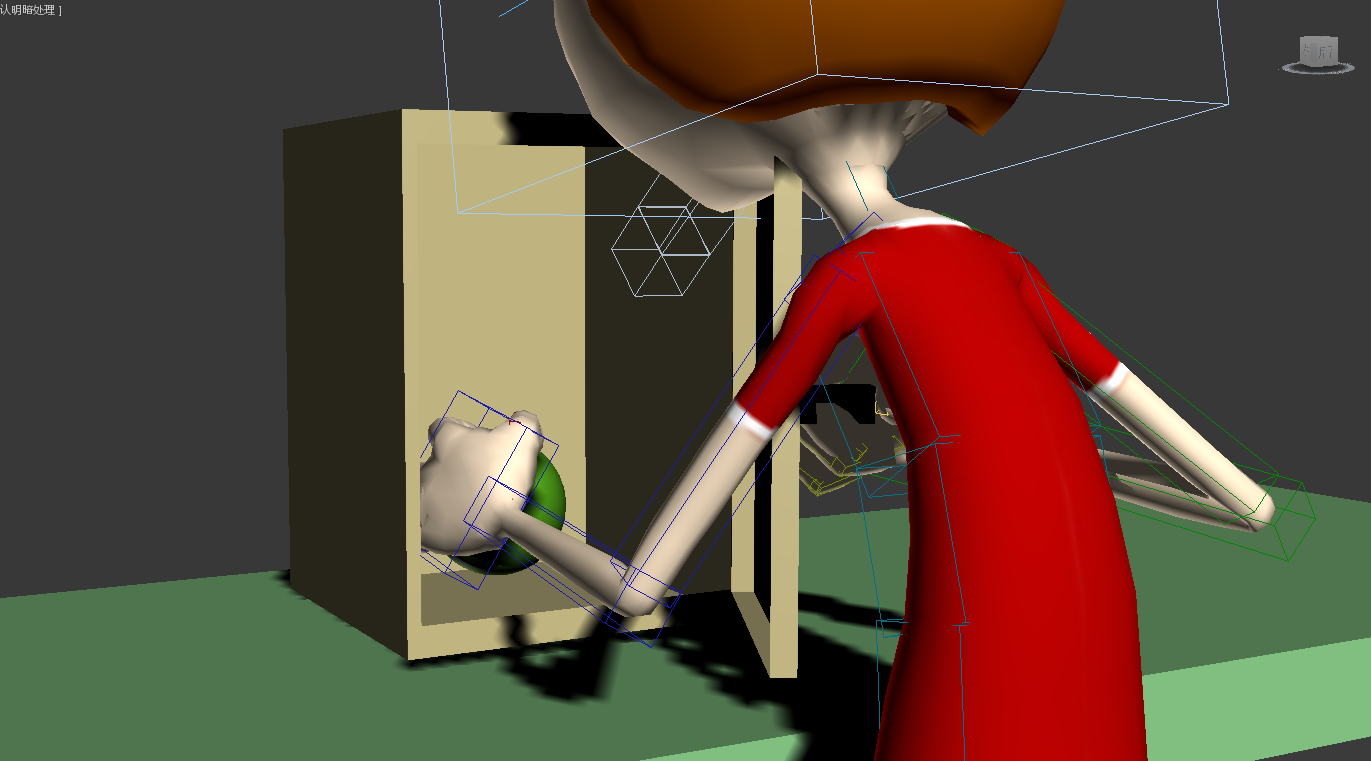
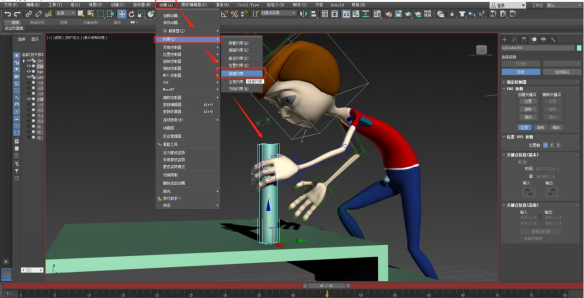
5.使用动画/约束/链接约束,选择物体链接到手部骨骼。
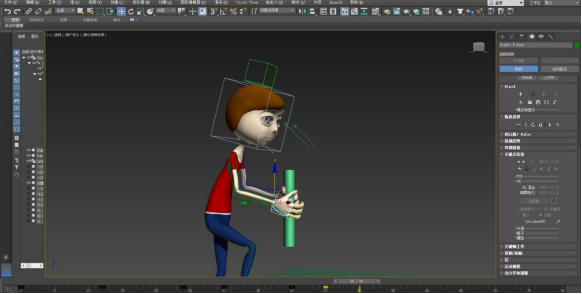
6.通过链接参数设置链接到“世界”和链接到“对象”,这样就完成了手拿起物体的效果。
备注:如须放下物体,则将物体连接到“世界”即可
<思政>
要学会使用反向思维去设计、制作。
骑脚踏车
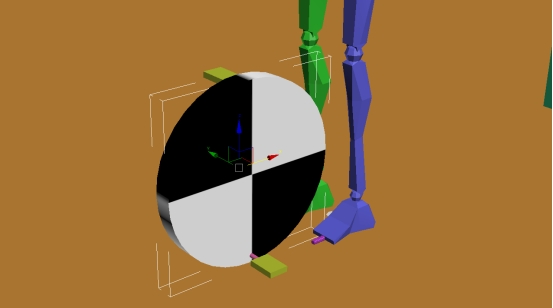
有踏板的独轮车的运动规律,就是踏板虽然随着轮子转而转,但是自身是不转的,当然实现这种规律的方法很多,这里面就使用约束里面的位置约束来实现。
1.首先先把踏板的轴连接到轮子上,让它随着轮子转而转:
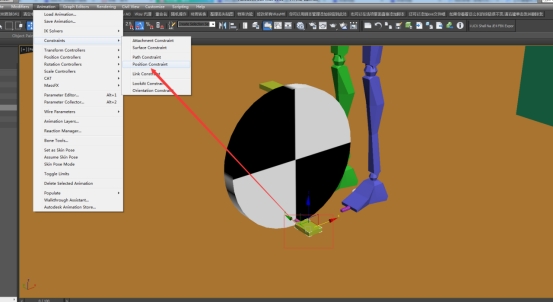
2.使用位置约束,把踏板约束的到轴上:
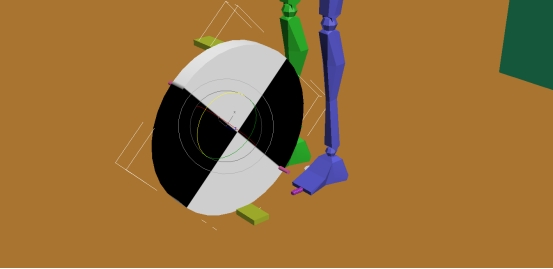
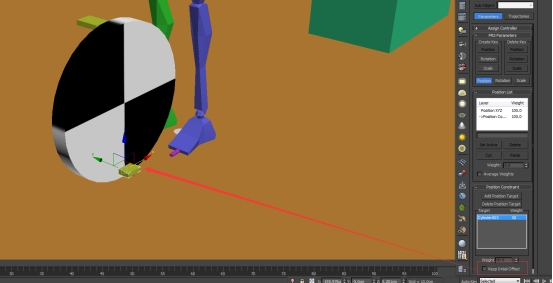
3.发现连接完以后,位置偏移了,这时候需要把保持初始偏移给勾上:
4.这样位置才正确,另一半也做相同的操作。
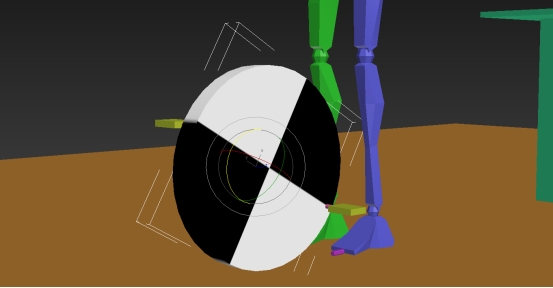
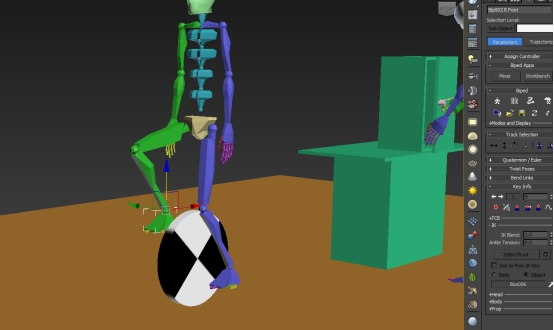
5.再次旋转轮子,发现踏板就对了,先给轮子一段旋转动画,然后把骨骼放到轮子上,调整好位置:
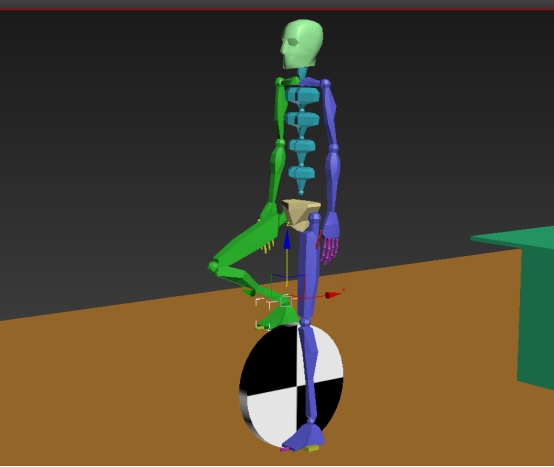
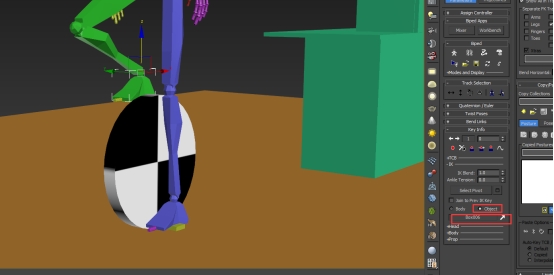
6.跟之前一样,给两只脚打上IK关键帧,这一次,为了避免弹出对话框,数字自动改回去,所以,先给两只脚添加 IK对象,然后再打关键帧:

7.给两只脚都添加好,IK对象
8.拖动时间轴,发现脚就跟着脚踏板一起动了。
9.最终动画: