

使学生了解经典控制理论的知识构架体系,在专业学习中的作用及其基本学习方法和要求;了解控制工程的发展史。掌握包括反馈控制原理、系统分类、对控制系统基本性能要求的基本概念。掌握控制系统动态特性数学模型的建立和分析方法、并学会应用时域分析、频域分析和稳定性判据等方法对已知系统的稳定性、快速性和准确性问题进行分析,具有初步的系统辨识能力,初步培养控制系统性能校正与设计的能力。具体细化为:
课程目标1:了解控制工程的发展史,熟悉机械工程控制论的研究对象与任务、掌握控制系统的基本概念、工作原理及基本组成,掌握控制系统的分类、对控制系统基本性能要求等基本概念,学会分析典型机电控制系统的工作原理与分类。(对应毕业要求指标点1.3:能运用相关专业知识对机电系统的构成、设计与制造进行分析。)
课程目标2:掌握线性控制系统数学建模的基本方法,具有对典型机、电线性系统进行数学建模的能力,具有对已有数学模型进行分析的能力。(对应毕业要求指标点2.2:能够对分解后的机电领域复杂工程问题进行表达与建模。)
课程目标3:具有对线性控制系统动态特性进行分析的基本知识,学会应用时域分析、频域分析和稳定性判据等方法对已知系统的稳定性、快速性和准确性等性能进行分析与计算。(对应毕业要求指标点2.3:能够对机电领域复杂工程问题进行性能分析与计算。)
课程目标4:初步具有利用MATLAB对控制系统进行仿真与分析的能力,初步建立对系统进行校正的能力。(对应毕业要求指标点5.2:能针对机电领域工程问题,选择和使用恰当的现代仪器、工具、专业模拟与分析软件、专业控制软件,对机电系统进行建模、仿真、分析与开发,并理解其局限性。)

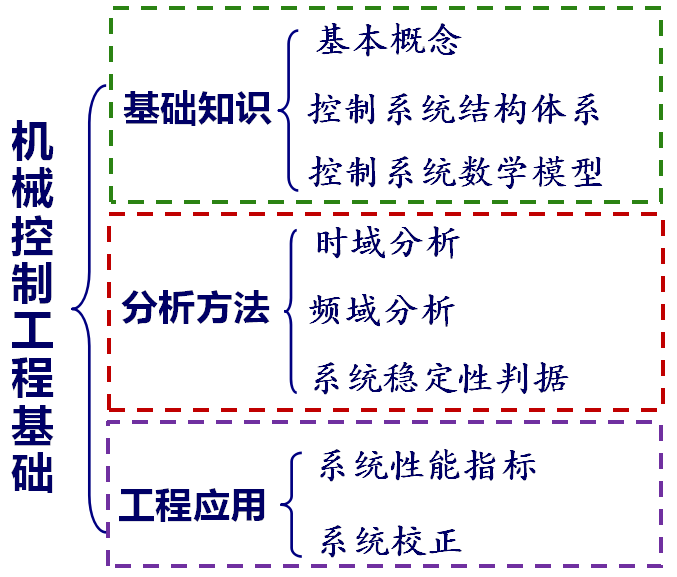
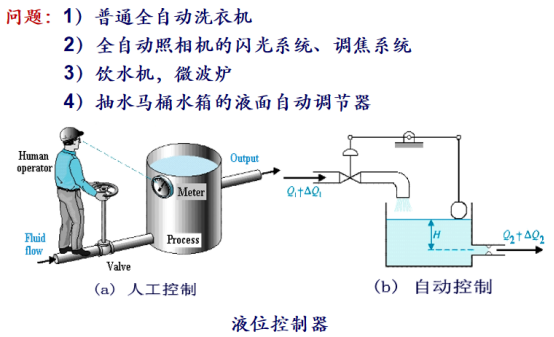
“控制工程基础”主要阐述自动控制技术的基础理论。机械控制工程基础是控制论(Cybernetics)与机械工程技术理论之间的边缘学科,侧重介绍机械工程的控制原理,同时密切结合工程实际,是一门技术基础课程。
随着微电子与计算机技术等的不断发展,机械制造技术发展的一个明显而重要的趋势,是越来越广泛而深入地引入了控制理论。例如,工业机器人、数控机床、机床动态测试与分析、电液伺服系统、精密仪器设备等都要用到控制工程的基础知识。
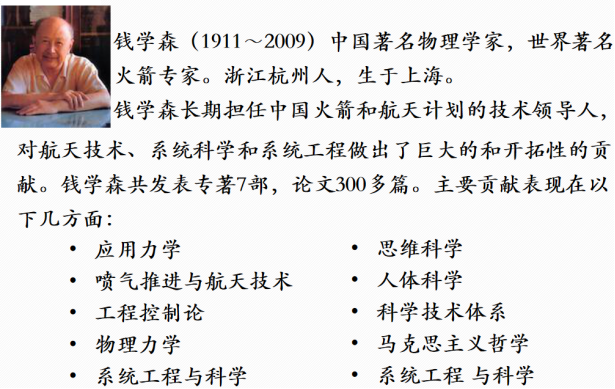
相对论、量子论和控制论本认为是20世纪上半叶的三大伟绩,称为三项技术革命,是人类认识客观世界的三大飞跃。“控制论”的两个核心是信息论和反馈控制。其中反馈控制的概念早在1868年麦克斯维尔发表的“论调速器”一文中就已经提出来。第二次世界大战期间及战后,电子技术、火力控制技术、航空自动驾驶、生产自动化、高速电子计算机等科学技术迅速发展,在这基础上,总结有关学科的研究成果并加以提高形成了“控制论”。首先创立这门学科的是美国的数学家、信息理论家(Norbert Wiener)诺伯特·维纳,他于1948年发表了“控制论”。维纳通过比较研究发现,在机器系统与生命系统、甚至社会系统、经济系统都具有一个共同特点,即通过信息的传递、加工处理并利用反馈来进行控制——控制论的中心思想。我国科学家钱学森于1954年发表专著《工程控制论》(英文版),首先提出了“工程控制论”的概念,并将控制论推广到工程领域。
随着科学技术的不断发展,控制理论日趋成熟,对社会进步和生产发展起到了深远的影响,其发展过程大体分为三个阶段。
第一阶段:20世纪40~50年代为“经典控制理论”发展阶段。经典控制理论主要以拉普拉斯变换为数学基础,用传递函数作为分析和设计的基础,基本的方法体系主要以作图、查表和便于手工计算的方法为基础,。这种方法对于线性定常系统是成熟有效的。
第二阶段:20世纪60~70年代为“现代控制理论”的发展阶段。现代控制理论是用状态空间法作为分析和设计的基础,基本的方法是时间域方法。这种方法对线性系统、非线性系统、时变系统、单变量和多变量系统均适用。
第三阶段:20世纪70年代末至今,控制理论向着“智能控制理论”发展,它是通过研究与模拟人类活动的机理,研究具有仿人智能的工程控制和信息处理问题。目前智能控制理论已经形成了模糊控制、神经网络控制和专家控制等重要的分支。
控制理论的发展历程,充分反映了人类社会由机械化走向电气化、进而迈向自动化、信息化和智能化的时代特征。


机械工程控制论主要研究机械工程技术中广义系统的动力学问题。具体地说,就是研究机械工程技术中的广义系统在一定的外界条件作用下,从系统的一定的初始状态出发,经历的由其内部的固有特性所决定的整个动态历程,研究输入、输出和系统三者之间的动态关系。
研究的对象:系统(广义系统)
研究的任务:动力学问题
研究的领域:机械工程领域

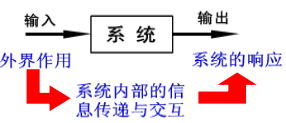
“系统”是指按一定规律联系在一起的元素的集合。构成系统的要素包括元素以及元素之间的关系。系统与外界之间的交互作用包括外界对系统的作用,如输入、干扰等,以及系统对外界的作用,如输出。系统可大可小、可简可繁、可虚可实,完全由研究的需要来决定。
“广义系统”是指具备系统要素的一切事物或对象。譬如,机器系统、生命系统、思维、学习、工作、社会经济系统、生产系统等。机械工程中的广义系统可以是元件、部件、仪器、设备,也可以是加工过程、操作设备、测量,或者是车间、部门、工厂、企业、企业集团、全球制造行业等。


1. 家用搅拌机
2. 家用普通台灯


3. 家用程序控制高压锅
4. 阿西莫人形机器人
5. 世界上最快的弯丝机
6. 蒸汽机离心调速器模型



例1.1 下图(a)、(b)分别表示同一个质量-阻尼-弹簧单自由度系统在不同输入时的情况。m,c,k分别表示质量、粘性阻尼系数和弹簧刚度。
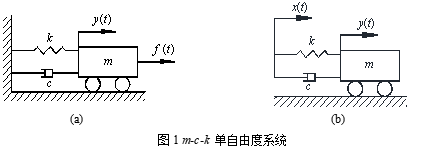
对于图(a)所示的系统而言,输入为作用在质量块上的外力f(t),输出为质量块的位移y(t),系统的动力学方程为

对于图(b)所示的系统而言,输入为作用在支座位移x(t),输出为质量块的位移y(t),系统的动力学方程为

为了更直观的分析,令p=d/dt(微分算子),则方程(1.1)和方程(1.2)分别化为

显然,系统(a)与系统(b)动力学方程的左端算子相同,由系统本身的结构和结构参数决定,反映了与外作用无关的系统本身的固有特性。右端算子反映了系统与外界的关系。
由系统(a)和系统(b)的动力学方程可以看出,例1.1所示系统的动力学方程包含五个环节:

上例中y(t)即为动力学方程的解,它应该由系统的初始条件、系统的固有特性、系统的输入以及系统与输入之间的关系所决定。

就系统、输入、输出三者之间的动态关系而言,工程控制论的研究任务可归纳为:
(1)系统分析问题。已知系统和输入,求系统的输出,并通过响应来研究系统本身的问题。
(2)最优控制问题。已知系统设计输入,且确定的输入应使输出尽可能符合给定的最佳要求。
(3)最优设计问题。已知输入设计系统,且确定的系统应使输出尽可能符合给定的最佳要求。
(4)滤波与预测问题。已知输出,确定系统,以识别输入或输入中的的有关信息。
(5)系统辨识问题。已知系统的输入与输出,求系统的结构与参数,即建立系统的数学模型。